 |
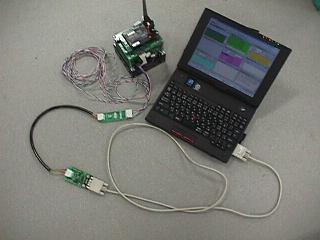 |
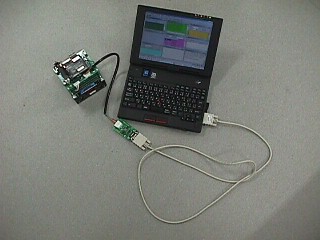
| 駆動側の接続の全体図 | 画像側の接続の全体図 |
| Robo-Eの最上部の基盤にあるVisualMonitor端子にRS232Cメディアコンバータからのケーブルを接続し、RS232Cクロスケーブルを経由してPCに接続する。 | Robo-Eの上から3番目の基盤(ビデオキャプチャーボード)の側面にある端子へRS232C分配基盤からのケーブルを接続し、RS232Cメディアコンバータ、RS232Cクロスケーブルを経由してPCに接続する。 |
| UP:目次 |
| BACK:2.2 実行形式ファイルの作成 |
| NEXT:2.3.2 駆動側ターゲットへのダウンロード・バッテリーバックアップ |
|
|
| 駆動側の接続の全体図 | 画像側の接続の全体図 |
| Robo-Eの最上部の基盤にあるVisualMonitor端子にRS232Cメディアコンバータからのケーブルを接続し、RS232Cクロスケーブルを経由してPCに接続する。 | Robo-Eの上から3番目の基盤(ビデオキャプチャーボード)の側面にある端子へRS232C分配基盤からのケーブルを接続し、RS232Cメディアコンバータ、RS232Cクロスケーブルを経由してPCに接続する。 |
 |
 |
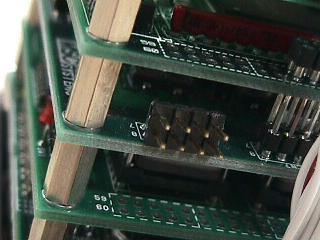
| VisualMonitor端子 | 接続時の様子 |
| 最も右側上部に赤線のケーブルがくるように接続します。 |
 |
 |
| RS-232Cメディアコンバータ | ケーブルを含めた様子 |
 |
 |
| RS-232Cクロスケーブル | PCのRS-232C端子 |
 |
|
| 分解基盤からのケーブルを接続する端子 | 接続の様子 |
 |
 |
| RS-232C分配基盤 | ケーブルを含めた様子 |