| UP:目次 |
| BACK:2.3.1 ダウンロードに必要な機材・接続方法 |
| NEXT:3.1 NiCdバッテリーの充電 |
2.3.2 駆動側・画像側ターゲットへのダウンロード/バッテリーバックアップ
ターゲットへのユーザプログラムのダウンロードは、ダウンロードに必要な機材・接続方法
で説明されている接続をし、リモートデバッガであるVisualMonitorを使用して行います。
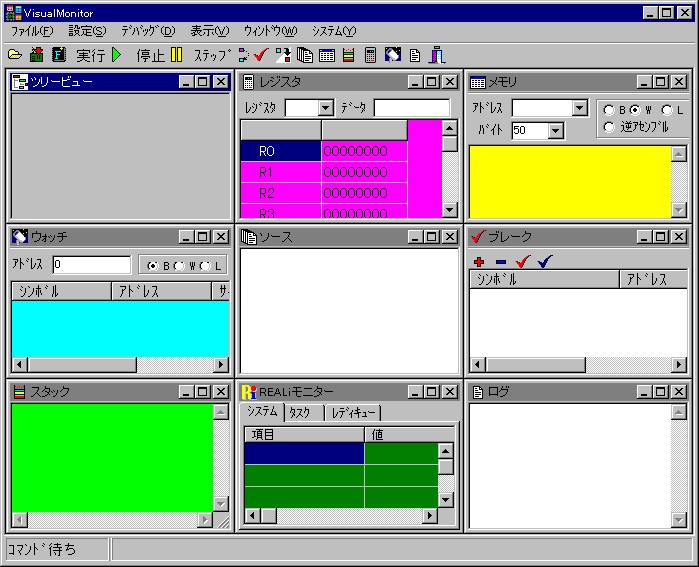
図1:VisualMonitorの画面
駆動側ターゲットへのダウンロード手順
駆動側についてはFlashROMを使用しているため、電源を切っても中のプログラムは消えません。そのため、画像側プログラムのみの変更の場合は、ダウンロードの必要はありません。
-
ケーブル接続後に電源を入れます。
電源を入れると同時にモーターが回転をはじめるので、Robo-Eを浮かせておく必要があります。
-
"ターゲットがリセットされました"と表示されるので、"OK"をクリックします。
-
 ボタンを押して、過去にFlashROMに書き込まれたプログラムを実行します。
ボタンを押して、過去にFlashROMに書き込まれたプログラムを実行します。
実行させるとモーターの回転が止まります。しかし、もしFlashROMの中にプログラムが書き込まれていない場合は
モーターが止まらないので、Robo-Eを浮かせたままにしておきます。
-
 ボタンを押して、実行を停止させます。
ボタンを押して、実行を停止させます。
-
 ボタンを押して、FlashROMをクリアするためのダイアログボックス(図2)を表示します。
ボタンを押して、FlashROMをクリアするためのダイアログボックス(図2)を表示します。
図2:FlashROMクリア
パラメータに"ALL"を選択し、"OK”ボタンを押します。
-
 ボタンを押して ダウンロードする実行形式のファイル"*.out"を選択し"開く"を押すことによりダウンロードが開始されます。
ボタンを押して ダウンロードする実行形式のファイル"*.out"を選択し"開く"を押すことによりダウンロードが開始されます。
-
ダウンロード終了後、電源を切ります。
画像側ターゲットへのダウンロード手順
画像側についてはSRAMを使用しているため、バッテリーバックアップをしていない場合においては、電源を切ることによりプログラムが消去されます。
そのため、起動させるたびにプログラムのダウンロードが必要となります。 バッテリーバックアップの方法等については、こちらを参考にして下さい。
-
ケーブルの接続を変更します。
-
電源を入れます。
-
"ターゲットがリセットされました"と表示されるので、"OK"をクリックします。
-
ボタンを押して、 ダウンロードする実行形式のファイル"*.out"を選択し"開く"を押すことによりダウンロードが開始されます。
もし、ダウンロードの際に、"タイムアウトエラー。ターゲットに電源が入ってますか?"
と表示されたら、電源が入っていない、もしくは、バッテリーがあがっている可能性があります。